Medical Graphics
Research Group
Research Group
Built with Jekyll © 2022. All rights reserved.

![]()
Built with Jekyll © 2022. All rights reserved.
![]()
CRaIVE was a consortium comprising of clinicians, physicists, computer scientists, clinical engineers and psychologists active between 2003 to 2014. Our aim was to implement and validate sophisticated virtual environments designed for use in the training of radiological interventional procedures. The Medical Graphics group (when at Bangor) was one of the founding members, along with the Royal Liverpool Hospital, Imperial College, University of Leeds, University of Manchester and the University of Hull. Two particular simulators developed are described below.
###Image Guided Interventional Needle Simulation (ImaGINe-S)
The ImaGINe-S simulator is used for training image guided needle puncture for visceral (e.g. liver biopsy) and vascular procedures. The simulation hardware consists of an optional 3D projection of the virtual patient co-located with two haptics devices, one used as an ultrasound transducer, and the other as a needle. The ultrasound image is displayed on a separate monitor. The user scans the virtual patient and performs a needle puncture (see figure) – both using haptics devices so that a realistic force response is experienced. A simulated ultrasound image can be used to track the needle to the target anatomy.
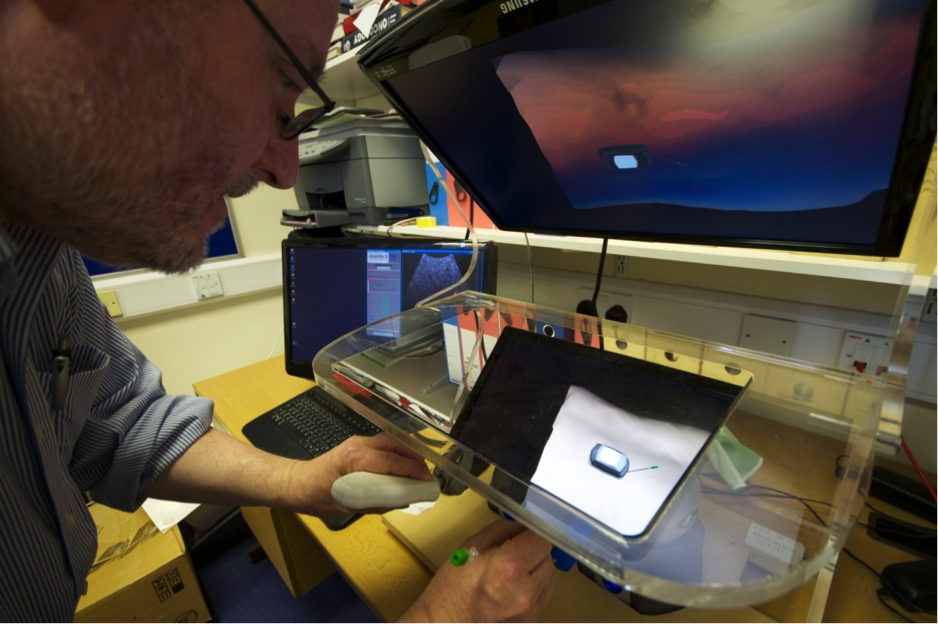
The project was funded by the UK Department of Health and was awarded second place in the Eurographics 2009 Medical Prize for its innovative use of computer graphics in a complex system that is already far advanced towards clinical use.
The Seldinger technique encompasses the steps involved in introducing a guidewire and catheter into the vascular system of the patient being treated. The CRaIVE solution combines two haptic devices: vessel puncture with a virtual needle and catheter and guide wire manipulation. The simulation software displays the instrument interactions with the vessels. Instruments are modelled using a mass-spring approximation, while efficient collision detection and collision response allow real time interactions.
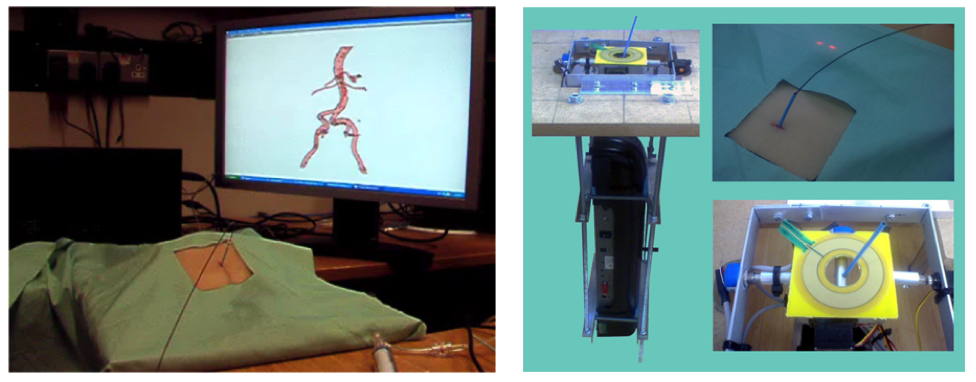
Our needle insertion haptic device opens a new field of training through its accurate tracking of the needle while it is inserted in the vessel. This part of the Seldinger technique is a key component of the training of novice radiologists, as it can be challenging to locate the vessels in some cases and difficult to position the needle in a correct way to facilitate safe guide wire insertion. The project was funded by the EPSRC.